|
|
|
|
FACULTY OF ELECTRICAL ENGINEERING AND
COMPUTING DEPARTMENT OF ELECTRONIC SYSTEMS AND INFORMATION PROCESSING |
|
|
LABORATORY FOR
SYSTEMS AND SIGNALS |
|



A student project
within the course
“SOFTWARE DESIGN FOR MEASUREMENT AND PROCESS SYSTEMS”
Telecontrol of a
Mindstorms® NXT Robot
User documentation
Kristina Bashota
Tibor Čordaš
Dalibor Jelača
Iva Jelenčić
Vedran Koruga
Damir Kušević
mentor
Zagreb, February 6,
2008.
Description
The
Mindstorm® NXT is a functional robot
which is controlled through a web interface. The website used is simple,
contains all elements for managing the robot and displays the data received
from its sensors.
The
picture of the robot is surrounded by arrows. By pressing one of the arrows the
robot starts moving in that direction. Opening and closing the robot's claws is
enabled by pressing the appropriate icon.
At
the bottom of the interface there are three icons which represent the three
sensors used in this project. The sensors consist of an ultrasonic sensor which
measures the distance from a nearest obstacle, a touch sensor for detecting low
obstacles and a sound sensor which also creates a sound signal. Data received
from the sensors is displayed below the matching icon.
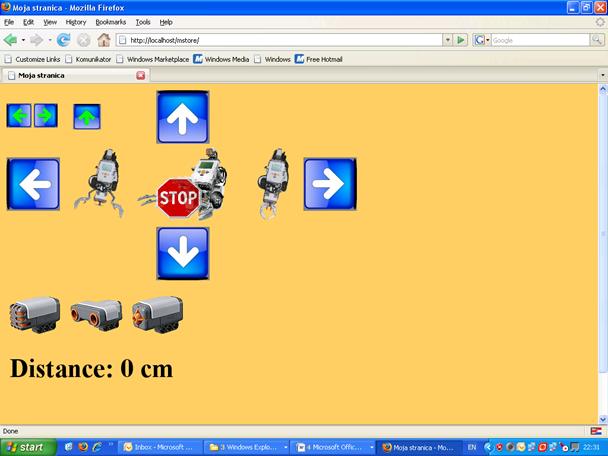
An image of
the web interface.